近日,国际旗舰会议 (ACM ICMR 2021) 雷达目标检测挑战赛(图1)落下帷幕。ACM ICMR是全球多媒体检索领域的顶级盛会和计算机视觉领域的著名会议,其主办的重要赛事历来久负盛名。

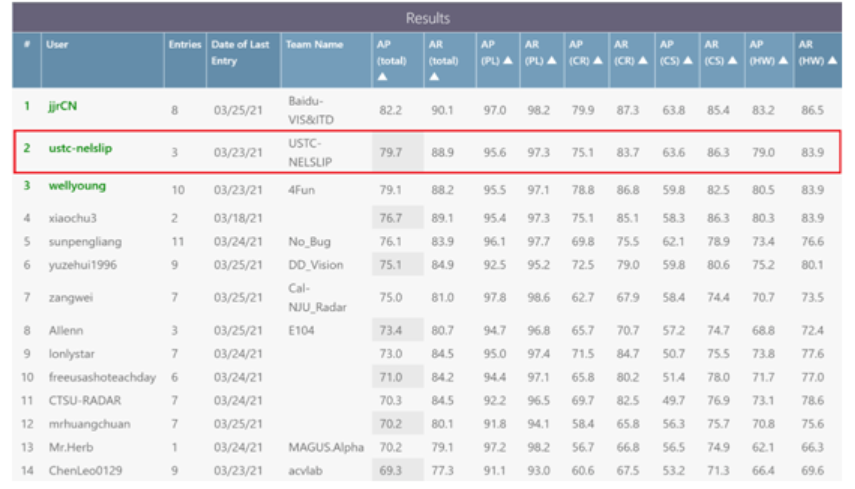
经过近3个月的激烈角逐,由湛达智能首席科学家、中国科学技术大学副教授於俊老师指导的USTC-NELSLIP参赛团队荣获亚军(图2)。该团队成员来自中国科学技术大学、平安科技、合肥湛达智能科技有限公司、广西大学。

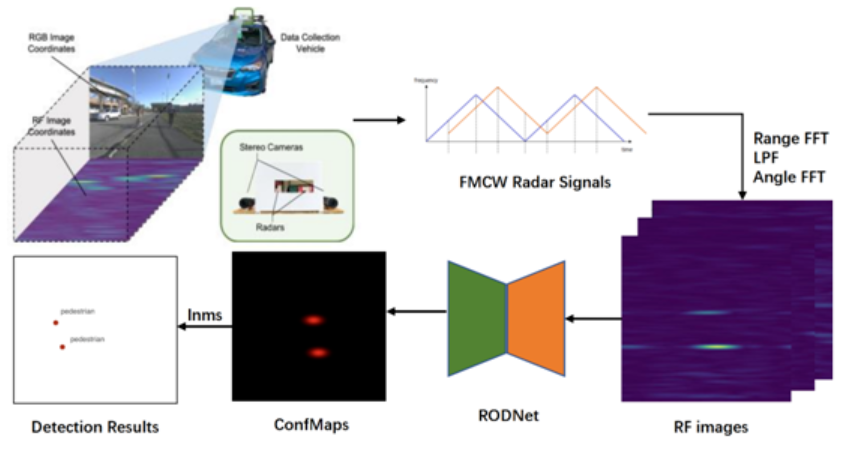
ACM ICMR 2021雷达目标挑战赛基于调频连续毫米波雷达(Frequency Modulated Continuous Wave (FMCW) Radar)进行复杂交通目标的检测,旨在提高车辆对周围环境进行准确和可靠地感知,促进自动驾驶或辅助驾驶发展。
在常用的传感器中,毫米波雷达在恶劣的驾驶情况例如弱光和恶劣的天气下,是一种可靠且经济的解决方案。但是,无论是在学术界还是工业界,对于基于毫米波雷达数据的目标检测研究都没有取得很好地进展。主要原因可以归结为三个方面:
1)雷达信号,尤其是射频数据不是像图像那样的直观类型的数据,因此严重低估了其在自动驾驶中的作用。
2)可用的具有对象标注的公共数据集非常有限,因此很难使用强大的机器学习机制来解决该问题。
3)从雷达信号中提取用于目标分类的语义信息非常困难。
针对上述难点,USTC-NELSLIP参赛团队创造性地提出多个模块来极大推动了雷达目标检测领域的进步(图3):(1)数据聚合模块,有效地利用雷达数据源的多种信息;(2)数据增强模块,加入噪声层以有效缓解数据泛化性不足的问题;(3)模型融合模块,通过设计损失函数和优化基础骨干网络等手段来训练了多个表现各异的模型,并且对它们进行有效融合以大大提高性能。这些模块的提出不仅大大提升了该团队的竞赛表现,而且有力地推动了雷达数据的目标检测研究,进而为未来的雷达目标检测研究领域提供了新的借鉴。
今年的参赛队伍十分豪华,吸引了中国科学技术大学、加州大学伯克利分校、苏黎世联邦理工学院、英国帝国理工大学、香港中文大学、国防科大并行与分布处理国家重点实验室、浙江大学、台湾国立成功大学、台湾屏东科技大学、南京大学、北京邮电大学、苏州大学、百度、滴滴、平安科技等100余个国际顶级名校和著名企业参赛。此次荣获亚军证明该团队在雷达交通目标检测算法方面的国际先进地位(图4)。
湛达智能感谢英伟达中国初创加速平台、亚马逊深度学习云平台、类脑智能开放平台支持!
该竞赛得到了国家自然科学基金联合基金、中国科学技术大学探索类基金等项目的支持。
ACM ICMR 2021雷达目标挑战赛的官方链接:https://competitions.codalab.org/competitions/28019#results